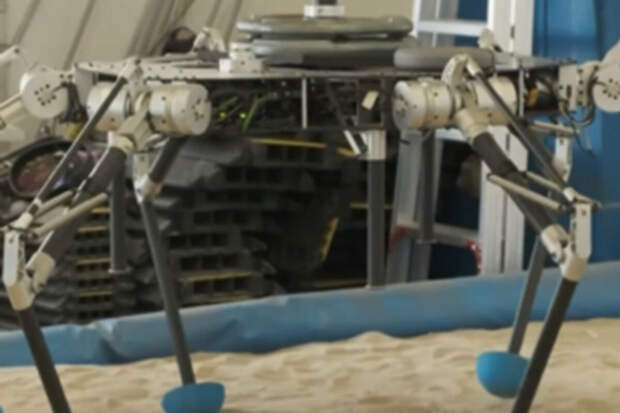
Шестиногий робот может совершить прорыв в изучения поверхности Луны. Об этом сообщает Global Times со ссылкой на китайский телеканал CCTV. "Корпус робота будет полностью управляемым, с повышенной устойчивостью, плавностью движений и высокой грузоподъемностью", - говорится в сообщении Гао Фэна, профессора Школы машиностроения Шанхайского университета Цзяо Тонг, который отвечает за разработку робота.
Шестиног превосходит четвероногие аналоги и сможет сохранять устойчивость даже при повреждении одной конечности. Он сможет одновременно поднимать три ноги. При этом остальные три образуют устойчивую опору, поддерживающую его корпус.
В рамках программы исследования Луны Китай планирует провести еще две миссии на спутник Земли перед началом строительства Международной научной лунной станции (МНЛС). Ближайшая "Чанъэ-7" запланирована на 2026 год.
Свежие комментарии